
MEINE ROBOTER
Meine Roboter haben nichts mit den Hi-Tech-Robotern zu tun, welche die Industrie und Grossfirmen mit aller Kraft hervor zwingen. Sie sind vielmehr eigenwillige Kinder, verspielt, hemmungslos, neugierig und unanständig. Sie versuchen das Dasein zu erfahren, in dem sie Rhythmen schlagen, Geräusche machen oder einfach sich selbst sind. Statt Muskelkraft verfügen sie über Servomotoren, Magnetventile und pneumatische Kolben. Statt Arterien und Nervenbahnen besitzen sie Kameras und Sensoren. Und statt eines organischen Kleinhirns, besitzen sie einen Laptop oder Mikrokontroller. Im Innern der Roboter funktioniert eine Software, die ihnen als Lebenselixier dient. Auf uns Menschen bezogen, würden wir diese Software wohl am ehesten als die Seele bezeichnen. Der Anspruch bei meinen Arbeiten möglichst Schrott- und Ausschussmaterialien zu verwenden, ist sehr hoch. Leider gelingt es mir nicht immer. Sollte sich unsere Wegwerfgesellschaft jedoch weiterentwickeln wie bisher, sind mir auch zukünftig Materialien vom Schrottplatz gesichert. Das kreative Denken wird durch diese Art von Arbeit tagtäglich gefordert.
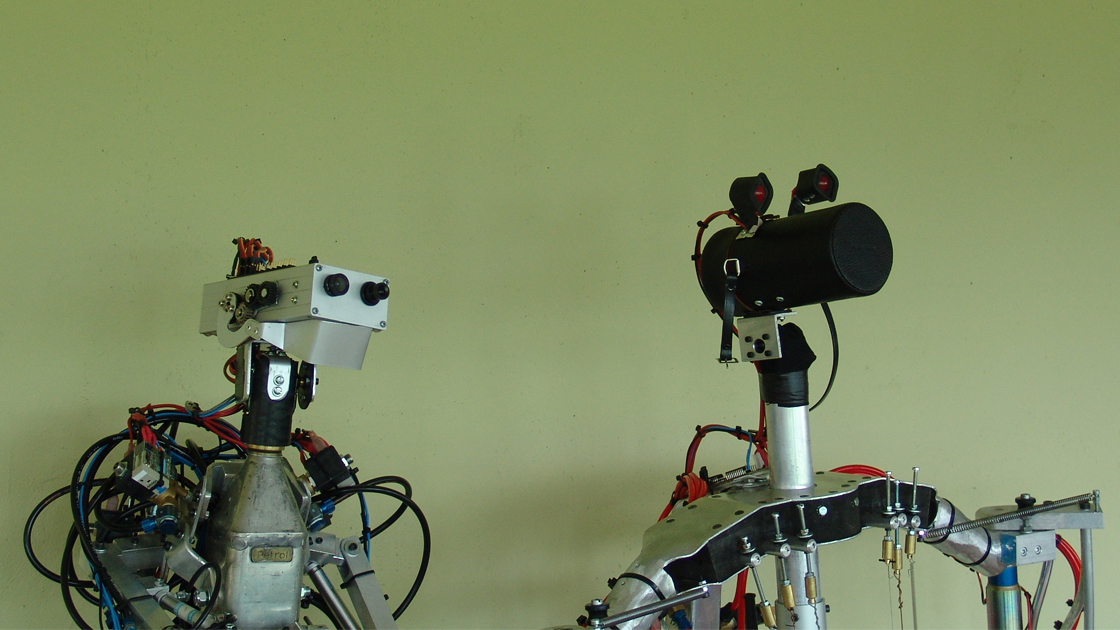

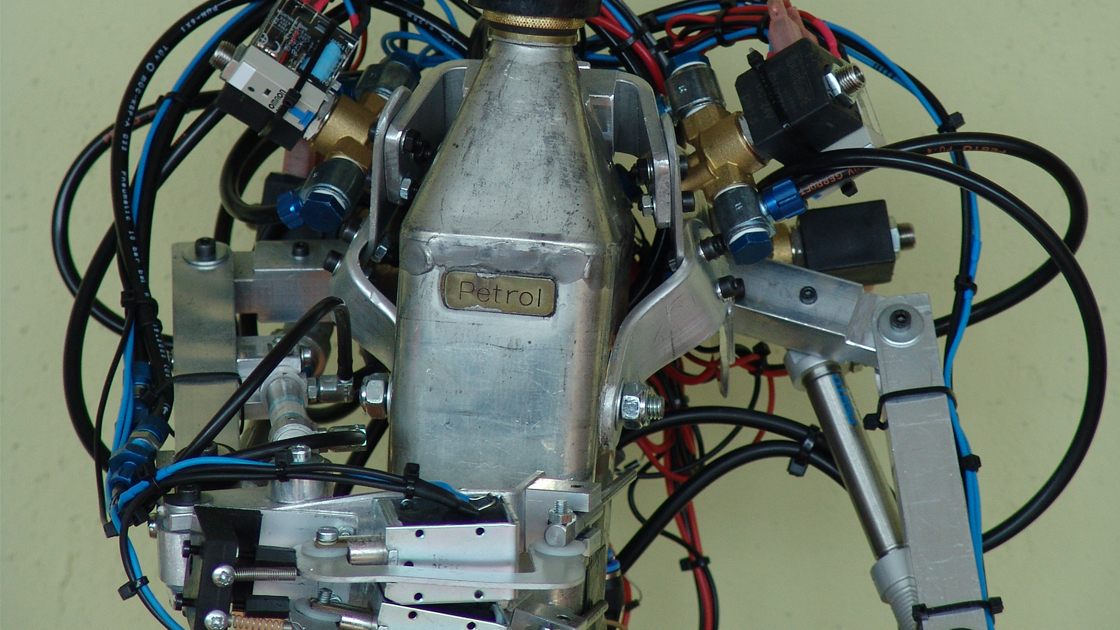
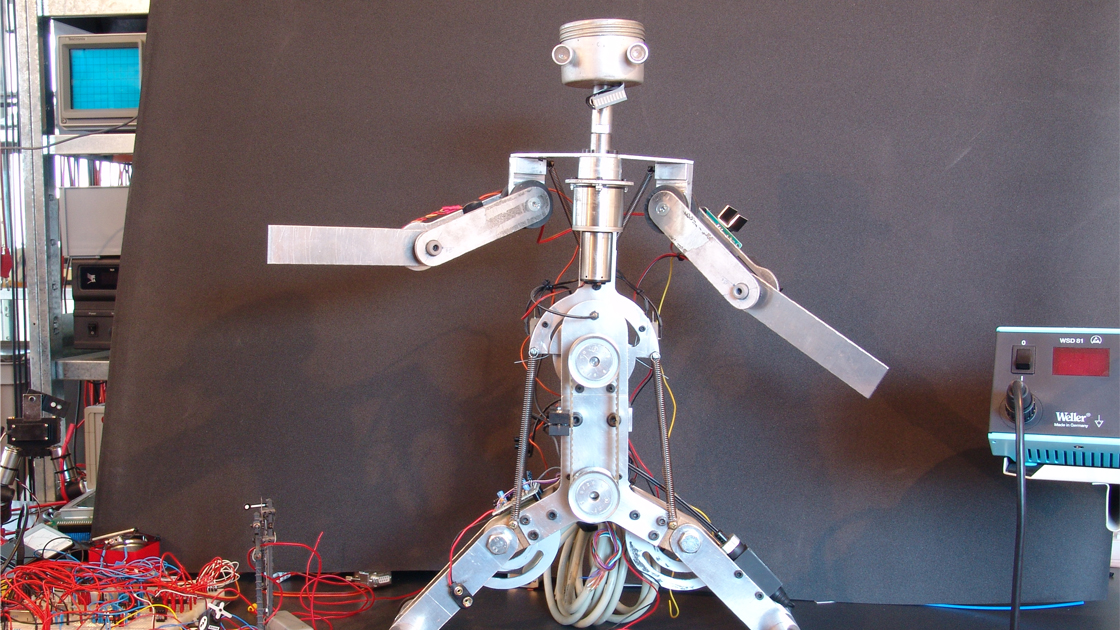
Petrol & Supermax
Die Roboter Band produziert rhythmischen minimalen Sound. Gesteuert wird sie mithilfe eines PC und einer von mir geschriebenen Software in Delphi (neu auch über Excel). Supermax spielt auf Gitarrensaiten, welche über seinen Bauch gespannt sind. Er zupft und schlägt die Saiten mit seinen Fingern an. Petrol spielt auf seinem Bauch und seinem Penis Perkussion. Mit seinen vier Fingern schlägt er im 4/4 Takt den Rhythmus. Seine beweglichen Arme lassen ihn schaukeln und knattern. Während die beiden ihren Beat spielen, beobachten sie die Leute, die sie umgeben. Mit ihren Kopfbewegungen reagieren sie auf neugierige Glotzer. Passt ihnen etwas nicht in den Kram, so lassen sie das sofort die Zuschauer merken.
Baujahr: 2007
Material: Industrieschrott, Elektronik, Pneumatik, Motoren, SW in Delphi usw.
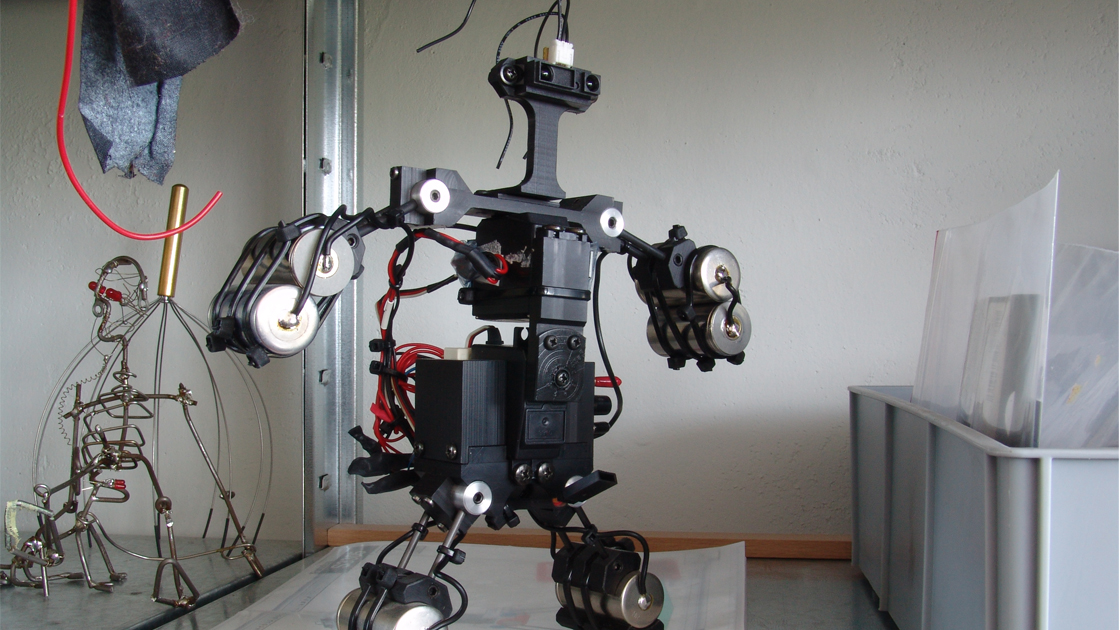
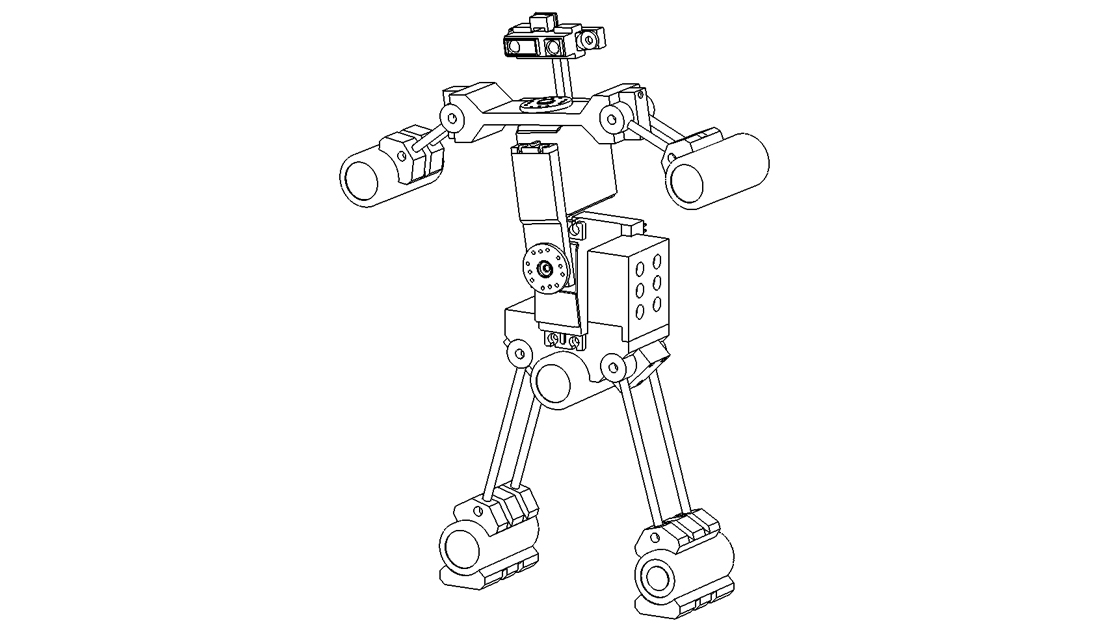
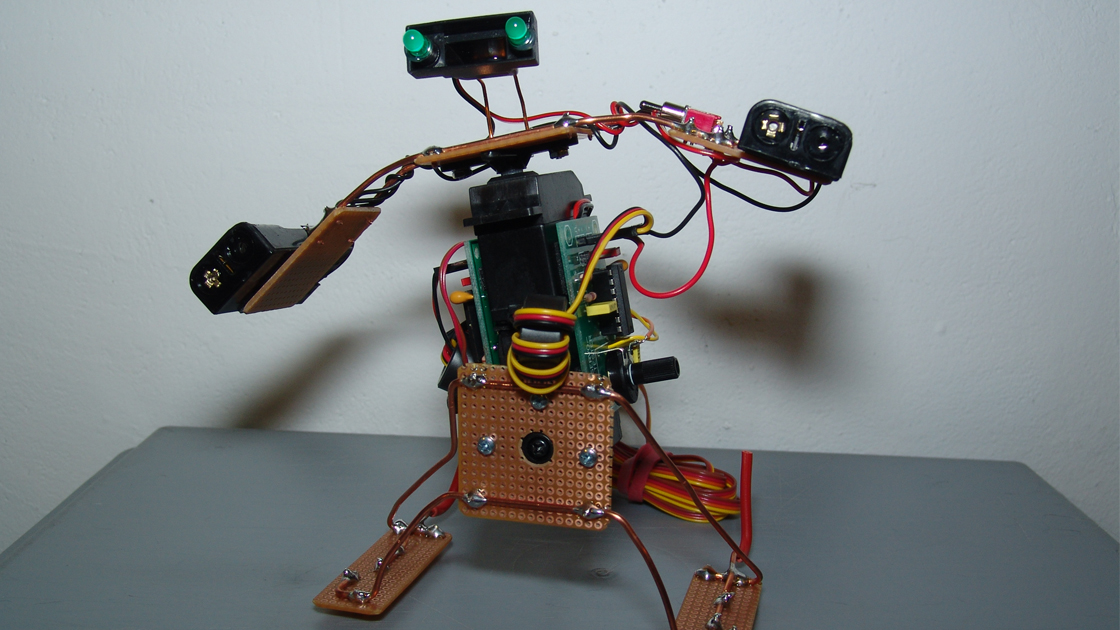
Läufer 1
Menschliches Gehen, die absolute Herausforderung vieler Roboter-Hersteller in Industrie und Grossfirmen. Der Läufer ahmt das menschliche Gehen in der einfachsten Form nach. Durch Gewichtsverlagerungen und ruckartige Bewegungen, kann der Roboter vorwärts, rückwärts und Kurven laufen.
Baujahr: 2004
Material: Modellbauservos, Elektronik, Motoren, ATmega8 usw.

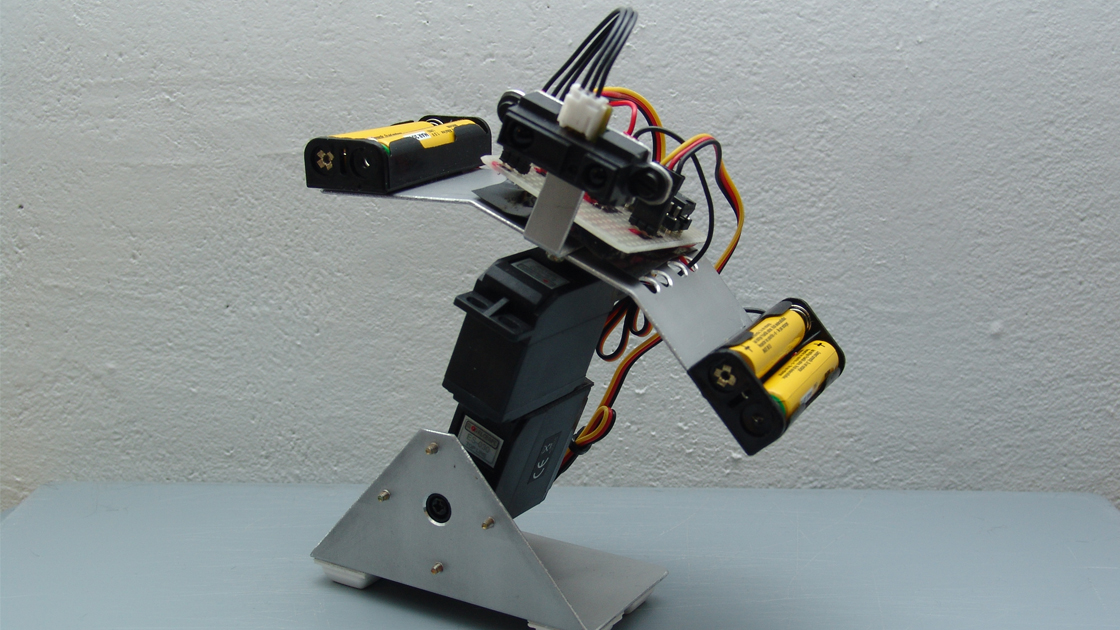
Kleinandroide
Der kleine Androide fühlt sich auf dem Planet Erde nicht Zuhause. Wird er eingeschalten, scannt er die Umgebung ab, flucht vor sich hin und meint zum Schluss:
„Bitte schalte mich wieder aus, auf diesem Planeten möchte ich nicht leben!“
Baujahr: 2004
Material: Modellbauservos, Elektronik, Wilke Tieger usw.

Sounder
Der mit Mikrofonen bestückte Roboter, wird zum Klang erzeuger. Die wippenden Bewegungen werden akustisch hörbar gemacht und zum ohrenbetäubenden Rhythmus.
Baujahr: 2004
Material: Getriebemotor, Elektronik, usw.
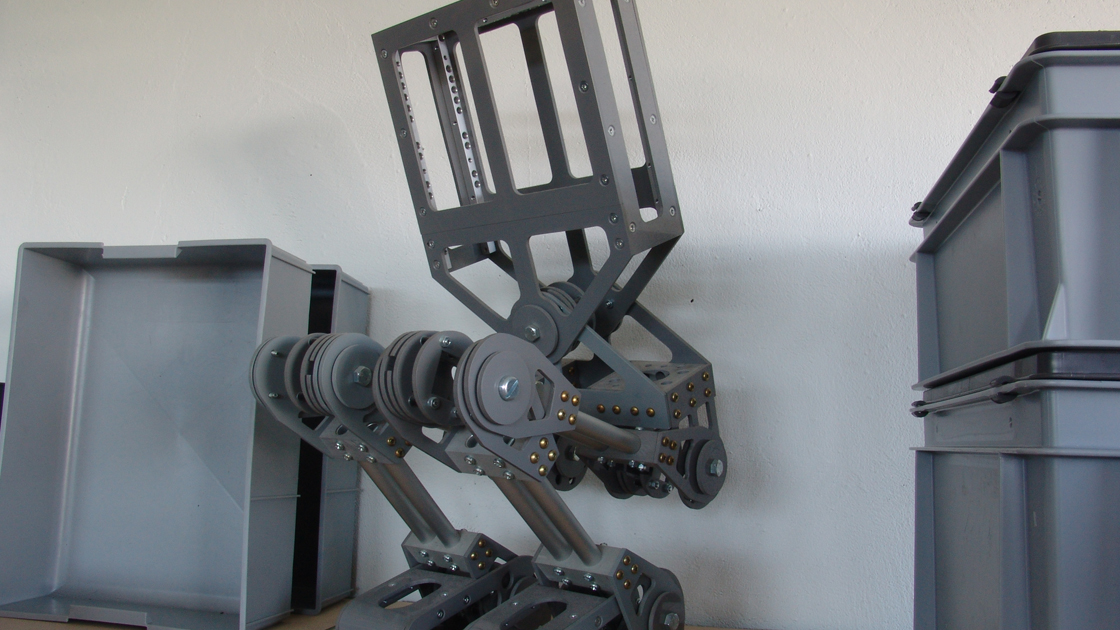
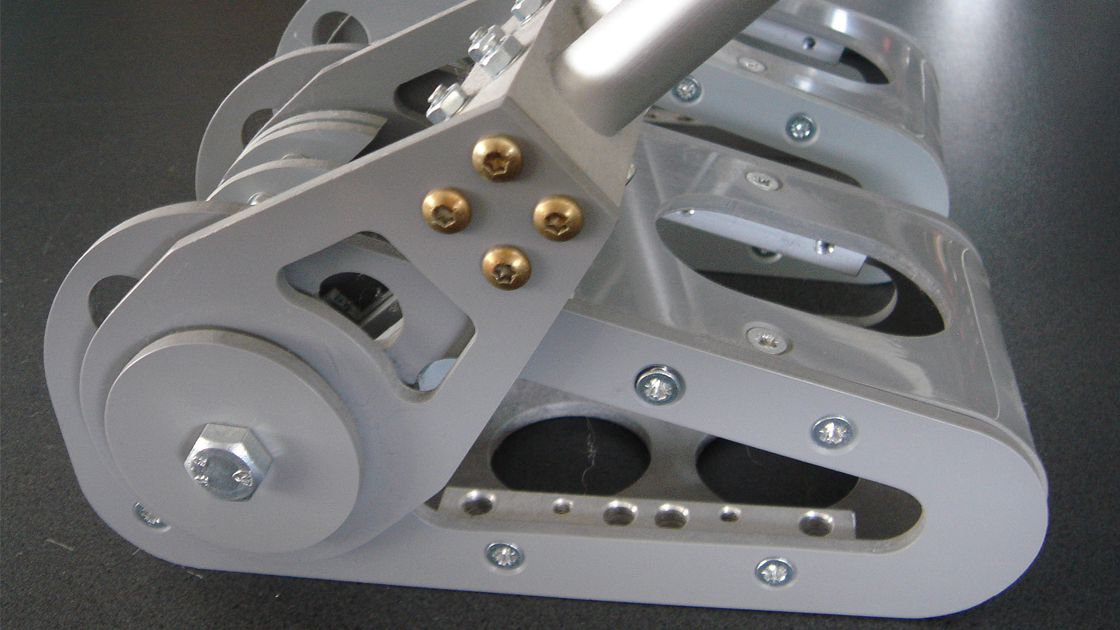
Bewegungsautomat
Einer meiner ersten Versuche einen Roboter zu bauen, scheiterte zum Glück. Meine Vorstellung von damals:
"Der Bewegungsautomat ist ein Bewegungskörper, der sich autonom auf zwei Beinen fortbewegt. PVC und Aluminium bilden die Körperelemente des Automaten. Stur folgt er seinen vorprogrammierten Steuerimpulsen in eine Richtung. Ohne Sensorik schreitet er Schritt für Schritt voran. Die mögliche Seitenneigung des Oberkörpers, verhilft dem Automaten zum nötigen Gleichgewicht, während dem Anheben des linken oder rechten Beines."
Baujahr: 2003
Material: PVC, Modellbauservos, usw.
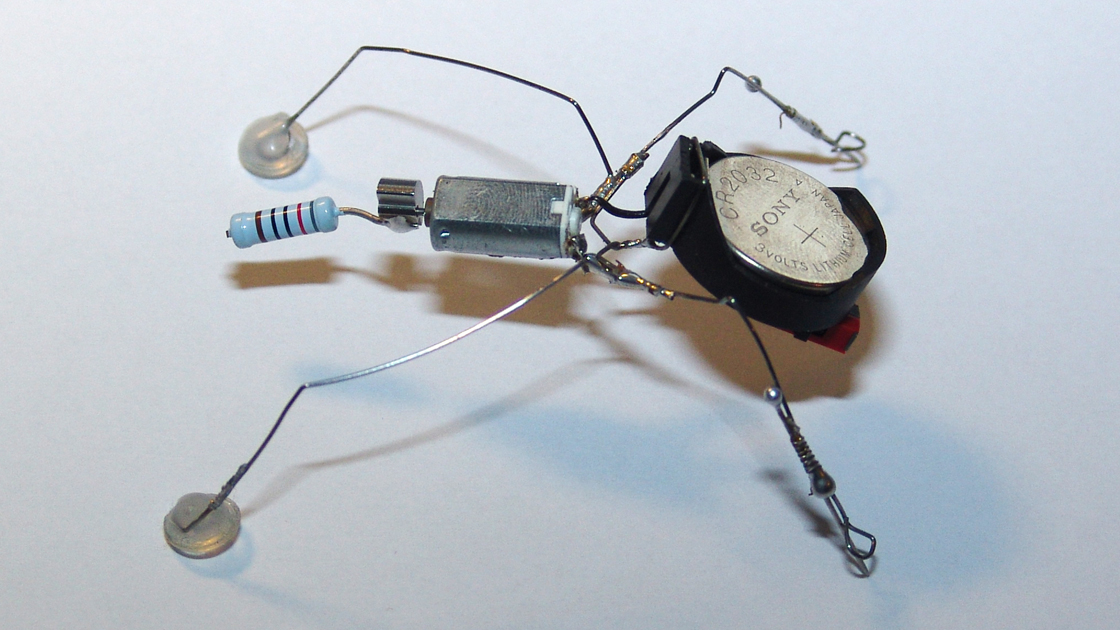

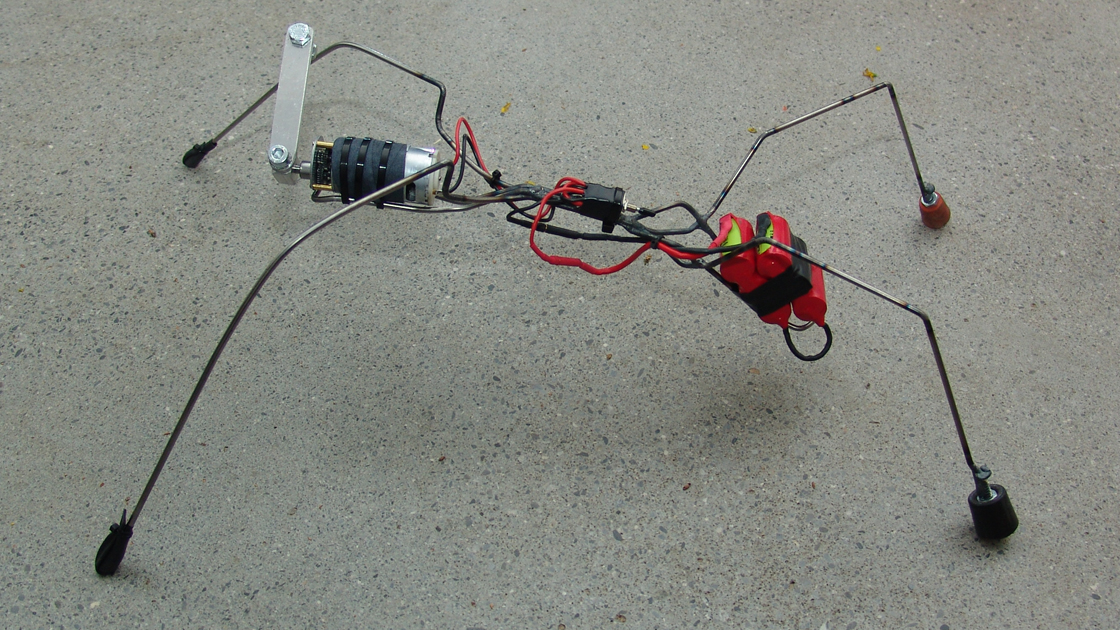
Vibra-RoboterInsekt
Zur einfachsten Möglichkeit einen Roboter zu bauen der sich am Boden vorwärts bewegen kann, gehört das Vibra-RoboterInsekt. Durch das Drehen eines Gewichtes, welches exzentrisch auf einer Elektromotorenachse angebracht wird, entstehen Vibrationen. Diese Vibrationen bringen den Roboter zum Hüpfen und somit in Bewegung. Beine aus Draht, welche beliebig gebogen werden können und ein Gewicht am Motor, welches ebenfalls verschieden ausgerichtet werden kann, ergeben viele interessante Möglichkeiten mit dem Roboter zu experimentieren.
Material: Draht, Vibramotor, Batterien usw.
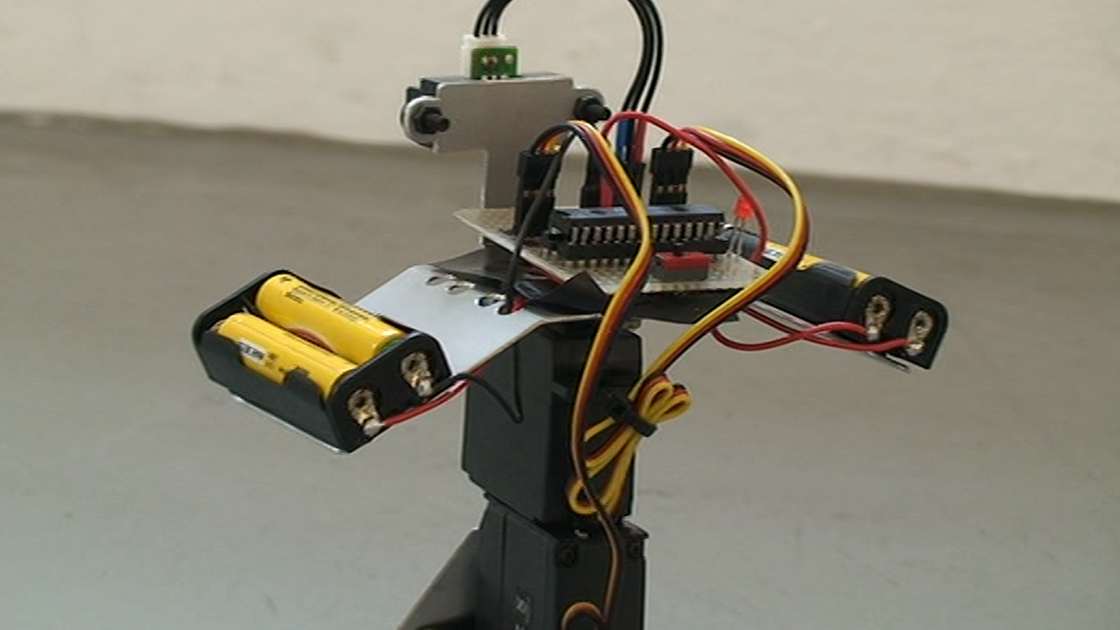
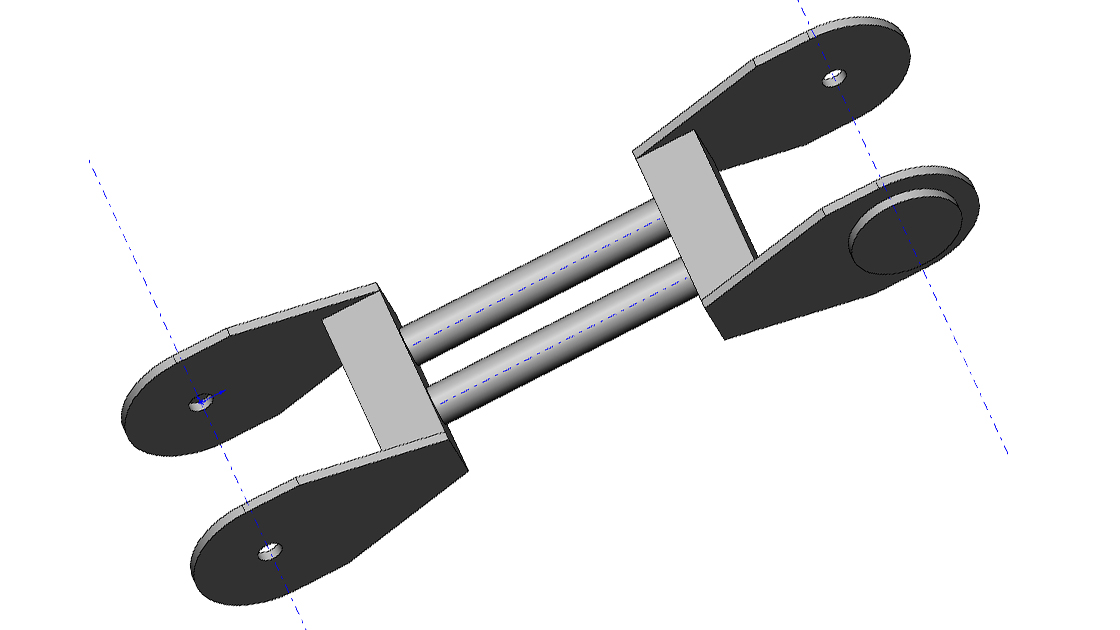
Läufer 2
Bewegungsmässig identisch mit Läufer 1, jedoch wurde die Mechanik und die Anatomie auf das einfachste reduziert.
Baujahr: 2004
Material: Modellbauservos, Elektronik, Motoren, ATmega8 usw.
EXCEL Läufer 2
Bewegungsmässig identisch mit Läufer 1 und Läufer 2, jedoch wird diese Version des Läufers nicht mit einem Mikrokontroller gesteuert, sondern mit der Zellenfarbe des Microsoft Excels. Licht-Sensoren werden an den PC-Monitor geheftet, diese reagieren auf die Helligkeitsunterschiede der Excel-Zellen, welche sich durch herunterscrollen der Tabelle farblich verändern. Zwei Servos verändern ihre Position synchron zum Licht-Sensor. Einfaches gehen vorwärts und rückwärts funktioniert wunderbar!
Excel: Mein Kredo ist ja bekanntlich, in meinen Arbeiten möglichst Schrott und Industrieabfälle zu verarbeiten. Natürlich ist auch Excel Software-Schrott und kann für so vieles „missbraucht werden“!
Baujahr: 2004
Material: Modellbauservos, Elektronik, usw.